Inductive Robot Charger Infrastructure Revolution: Quantifying the Wireless Energy Backbone Powering Autonomous Robotics at Scale

Inductive Robot Charger Infrastructure Revolution: Quantifying the Wireless Energy Backbone Powering Autonomous Robotics at Scale
The next phase of industrial automation is no longer defined by robot intelligence alone. It is increasingly defined by energy availability. As warehouses, hospitals, airports, manufacturing plants, and logistics hubs deploy larger fleets of autonomous machines, the ability to keep those machines operating continuously becomes a measurable infrastructure challenge. This is where the Inductive Robot Charger emerges as a foundational technology rather than a peripheral accessory.
A decade ago, most robotic fleets relied on plug-in charging systems that required mechanical alignment, human intervention, or dedicated charging downtime. Today, operators managing fleets of 100 to 1,000 robots are discovering that every minute spent docking, unplugging, or waiting for battery replenishment directly impacts utilization rates. An Inductive Robot Charger eliminates physical electrical contact and enables energy transfer through electromagnetic induction, reducing wear points while increasing charging opportunities across the robotic workflow.
The economics are straightforward. If a warehouse robot operates 20 hours per day and loses 30 minutes due to charging inefficiencies, utilization drops by approximately 2.5%. Across a fleet of 500 robots, that translates into hundreds of productive machine hours lost every month. Consequently, investment in Inductive Robot Charger infrastructure is increasingly evaluated as an operational efficiency project rather than a charging equipment purchase.
Infrastructure planners are beginning to treat charging zones similarly to wireless network deployments. Instead of a few centralized charging stations, distributed Inductive Robot Charger installations are integrated into robotic traffic routes, pick-up zones, staging areas, and idle locations. The result is opportunity charging, where robots replenish energy in short intervals throughout the day.
A modern fulfillment center spanning 50,000 square meters may support 300 to 800 autonomous mobile robots. In such environments, even a 5% improvement in fleet uptime can create productivity gains equivalent to deploying dozens of additional robots without purchasing new hardware. This is one reason the Inductive Robot Charger has become closely associated with large-scale automation expansion strategies.
The technology itself relies on primary and secondary coils separated by an air gap. Efficiency levels typically range from 85% to above 95%, depending on alignment accuracy, operating frequency, thermal management, and power requirements. While wired charging can achieve slightly higher efficiency, maintenance savings often offset the difference. Facilities report reductions in connector failures, corrosion issues, and cable replacement cycles after adopting Inductive Robot Charger systems.
The growth of robotic ecosystems has also altered infrastructure design priorities. Previously, charging stations occupied less than 2% of operational floor space in many warehouses. With autonomous systems becoming central to material movement, charging infrastructure planning can influence 5% to 10% of robotics-related facility design decisions. As a result, architects increasingly incorporate Inductive Robot Charger placement during initial facility construction rather than as a retrofit.
According to Staticker, the global Inductive Robot Charger market in 2026 is expected to expand at a strong pace, supported by accelerating deployment of autonomous mobile robots, automated guided vehicles, service robots, and healthcare robotics. Staticker projects sustained growth through the forecast period as wireless charging infrastructure penetration rises across logistics, manufacturing, healthcare, and public-service environments. The forecast is driven by increasing robotic fleet density, higher demand for autonomous operations, and growing preference for maintenance-efficient charging systems over conventional contact-based approaches.
One of the strongest use cases for the Inductive Robot Charger can be observed in e-commerce logistics. Large fulfillment facilities often process hundreds of thousands of order lines daily. Robots traveling 10 to 20 kilometers per shift consume significant battery capacity. Instead of returning to a central charging hub, robots equipped with Inductive Robot Charger compatibility can receive incremental energy top-ups during natural workflow pauses. A two-minute charging opportunity repeated 15 times daily can substantially reduce the need for long charging sessions.
Healthcare presents another compelling application. Hospitals increasingly deploy autonomous robots for medicine transport, laboratory sample movement, linen distribution, and food delivery. A hospital operating 50 robotic units may require near-continuous availability because transportation delays directly affect patient care workflows. In such environments, the Inductive Robot Charger reduces mechanical connection failures and minimizes human involvement in charging management.
Airports are also becoming important adoption centers. Autonomous cleaning robots, security patrol systems, and passenger assistance robots operate across vast terminal spaces. An Inductive Robot Charger enables these machines to recharge without exposing connectors to dust, moisture, cleaning chemicals, or heavy public interaction. Infrastructure managers value this because maintenance cycles can be reduced by measurable percentages over the equipment lifecycle.
From a technical perspective, alignment tolerance has become one of the most important innovation areas. Early wireless systems required precise positioning. Newer Inductive Robot Charger architectures can tolerate positional deviations measured in centimeters while still maintaining efficient power transfer. This improvement significantly reduces navigation complexity for autonomous robots.
Battery strategy is also evolving alongside Inductive Robot Charger deployment. Traditional robotic systems often depended on oversized battery packs to guarantee long operational periods between charges. Oversized batteries increase vehicle weight, capital cost, and charging duration. Wireless charging infrastructure allows operators to reduce battery size while maintaining operational performance. In some applications, battery capacity reductions of 10% to 20% can produce meaningful savings when multiplied across large fleets.
Manufacturing facilities illustrate another layer of quantifiable value. An automotive assembly plant may deploy hundreds of automated guided vehicles moving components between production zones. Every unplanned charging interruption can influence production flow. By integrating Inductive Robot Charger stations into loading, unloading, and waiting locations, manufacturers transform idle time into productive charging time. This creates a more predictable energy ecosystem and improves fleet availability.
Safety metrics further strengthen the business case. Wired charging introduces exposed connectors, cable wear, and mechanical contact points. In contrast, an Inductive Robot Charger system minimizes physical interaction between power delivery components. For facilities pursuing stringent safety compliance targets, reducing connector-related risks contributes to broader operational objectives.
The sustainability dimension is equally significant. Large robotic installations consume substantial electrical energy annually. While charging technology alone does not reduce total energy demand, an efficiently deployed Inductive Robot Charger network can improve battery health, reduce replacement frequency, and lower electronic waste generation. If battery replacement intervals are extended by even one year across hundreds of robots, the environmental and financial impact becomes substantial.
Looking ahead, the future of robotic infrastructure may resemble wireless communication networks. Just as Wi-Fi transformed digital connectivity from a fixed resource into an accessible service layer, the Inductive Robot Charger is positioned to transform energy delivery into an embedded infrastructure capability. Facilities will increasingly be designed around autonomous movement patterns, with charging availability integrated into every stage of robotic operation rather than concentrated in dedicated locations.
Request for customization: https://staticker.com/reports/inductive-robot-charger-market/
Categorias
Leia mais
Efficient service and professional presentation are crucial for hotels, restaurants, and catering businesses. Selecting the right wholesale tableware for professional service ensures durability, hygiene, and a consistent dining experience. Bulk tableware helps hospitality businesses manage high-volume operations while maintaining uniformity across all dining areas. Why Bulk Tableware Matters?...

"Executive Summary Paper Chemicals Market Market Size and Share Forecast The global Paper Chemicals market size was valued at USD 35.01 billion in 2024 and is expected to reach USD 51.13 billion by 2032, at a CAGR of 4.3% during the forecast period The Paper Chemicals Market Market report gives strength to the organization and makes better decisions for...
As vehicle usage continues to grow across businesses and personal transportation, the need for smarter monitoring and control systems has become more important than ever. Organizations managing fleets face challenges such as rising fuel costs, vehicle misuse, delayed deliveries, and maintenance inefficiencies. Meanwhile, individual vehicle owners are increasingly concerned about safety, theft...

7 Brew cup sizes are designed to be simple yet flexible, offering three main options—small, medium, and large—with different volumes depending on whether the drink is hot or iced. For hot beverages like coffee or tea, sizes typically range from 12 oz (small), 16 oz (medium), to 20 oz (large), while iced and blended drinks come in larger cups such as 16 oz, 24 oz, and 32 oz to...
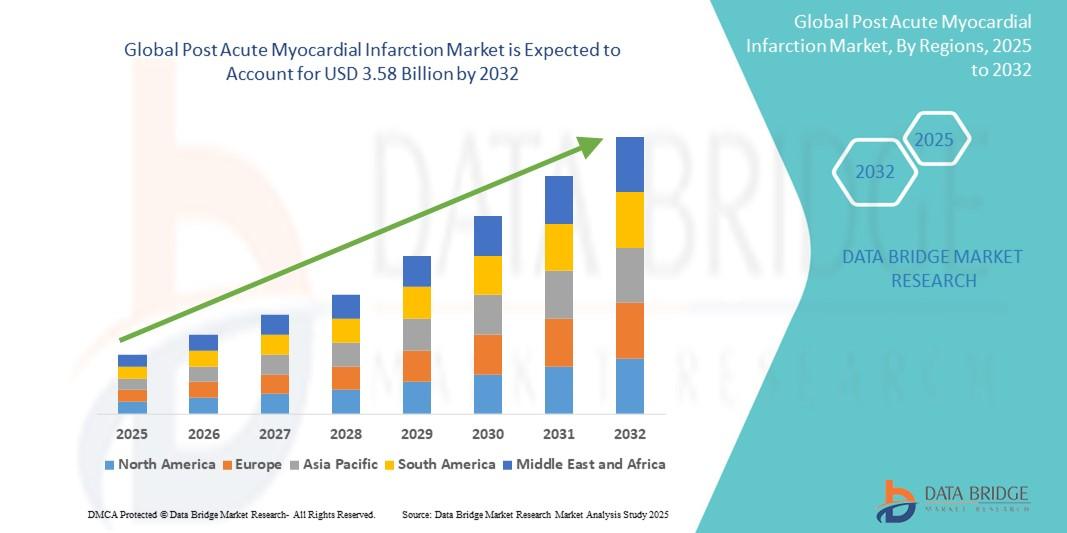
"Comprehensive Outlook on Executive Summary Post Acute Myocardial Infarction Market Size and Share CAGR Value The global post acute myocardial infarction market size was valued at USD 2.18 billion in 2024 and is expected to reach USD 3.58 billion by 2032, at a CAGR of 6.40% during the forecast period Post Acute Myocardial Infarction Market research...